
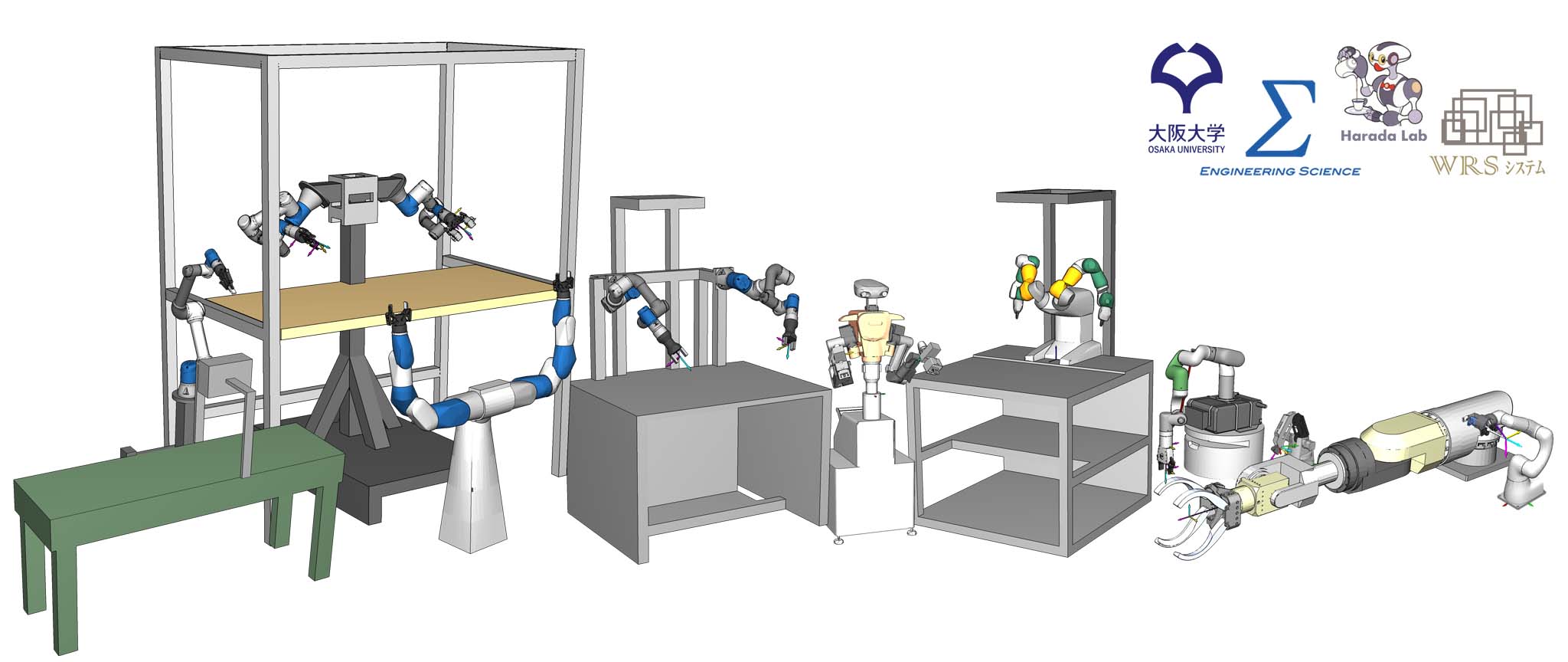
This webiste is in English. For Japanese information, goto my Researchmap. The following pictures show the robots in our lab. They are rendered using a simulation/planning system I developed under the support of NEDO. A bunch of videos about the system can be found in my Youtube channel.


Short Bio
I am an associate professor at the School of Engineering Science, the University of Osaka, Japan. I run a lab together with Professor Kensuke Harada and Assistant Professor Takuya Kiyokawa, focusing on robotic manipulation.
Prior to the University of Osaka, I was on a tenure-track position at the Manipulation Research Group, Intelligent System Research Institute, National Institute of Advanced Industrial Science and Technology (AIST) during 2015-2017. I was affiliated with the Japan Society for the Promotion of Science (JSPS) from 2013 to 2015 and did my postdoc research at the Manipulation Lab in the Robotics Institute, Carnegie Mellon University. I received my Ph.D. in Robotics from the Graduate School of Information Science and Technology, The University of Tokyo in 2013.
I am an IEEE senior member, with affiliations in the IEEE Robotics and Automation Society and the IEEE Systems, Man, and Cybernetics Society. I am also a member of RSJ (the Robotics Society of Japan) and JSME (Japan Society of Mechanical Engineers). I serve as an Editor on the IROS Conference Paper Review Board (CPRB) and Co-Chair of the IEEE Technical Committee on Mechanisms and Manipulation (TCMoMa).
Research Journey
Manipulation is not about moving the robot; it is about organizing and exploiting interactions among the robot, the object, and the environment. This brief summary grew out of a path that started with motion planning. At Peking University, I worked on motion planning under the supervision of Professor Hong Liu. During my Ph.D. at the University of Tokyo, I worked with Associate Professor Rui Fukui, Professor Tomomasa Sato, and Professor Yasuo Kuniyoshi, focusing on grasping, caging, and related mechanical design problems. During my postdoc at Carnegie Mellon University, I worked with Professor Matt Mason and focused on regrasp. At AIST, I mainly worked on industrial applications of robotic manipulation. Since joining the University of Osaka, I have been working with many talented students on both theoretical and applied aspects of the research. You may find more information about my research at my YouTube channel and my GitHub repositories:
![]()
![]()
Prospective Students
If you are considering our lab, you are probably looking at the top-tier institutes working on robotic manipulation. Thank you very much for your interest. In our lab, we challenge our students to develop practical integrated hardware and software systems. We have strong connections with industry and train our students to not only publish high-quality papers but also develop systems that solve real-world problems raised by our partners. The research topics of students working with me can be found on this page.